


")
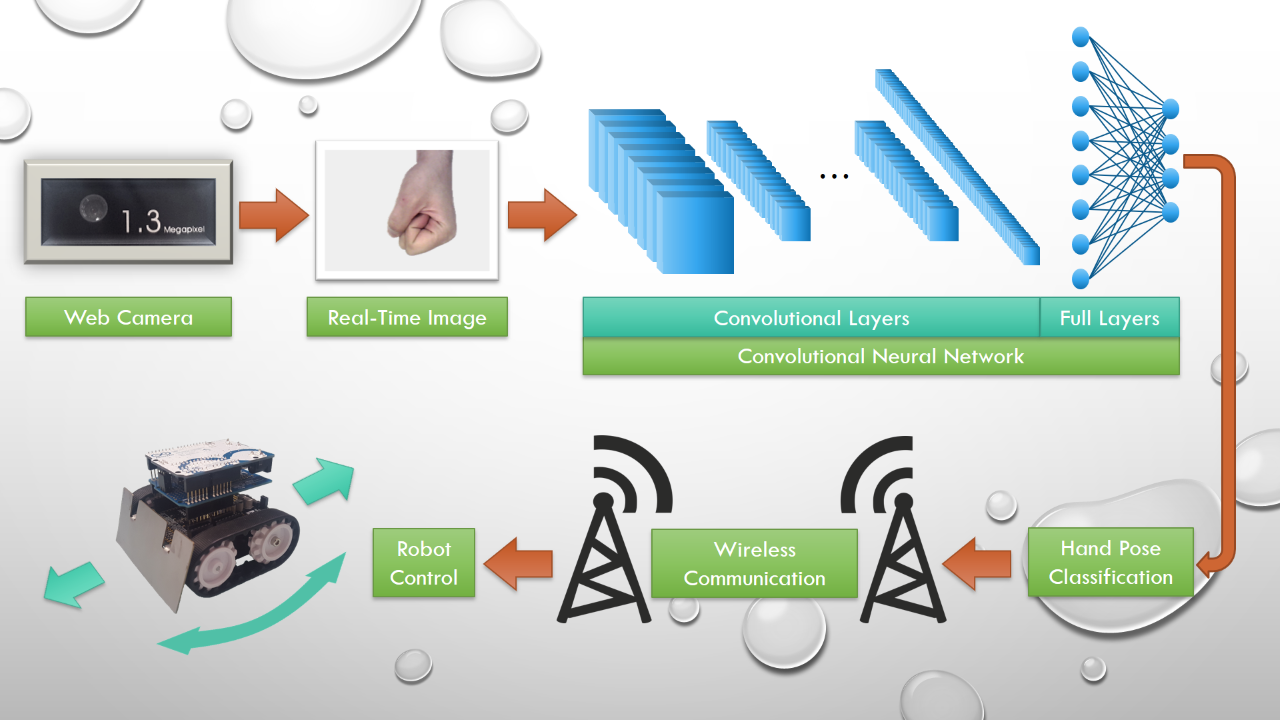
The system uses an A.I. model to analyze the video feed from the web camera and predict which hand pose is in the video. The robot controller gets this information and commands the robot’s axes motion. As the robot is completely independent from the A.I. model, they communicate through a wireless interface.
AI Technology

Easy image preprocessing tool “CRAFT-IT”
We are selling “CRAFT-IT” Easy automated image processing, expert skills are available without spe […・・・・
More details>>
AI Technology・Development
Development of a software to control vehicles automatically through a camera
We have developed a software to control vehicles automatically through a camera, just by adding "dots" on its control di・・・・
More details>>
AI Technology・Development
“UbiMouse”, non-contact operation AI software that enables operation without touching the screen
AI software that can be operated without touching a screen and controlling a mouse Smartphone and PC can be op […・・・・
More details>>
Development・Robot Technology

Remote-controlled construction robots for firefighters rescue operation
We have developed an remote-controlled construction robot working with a rescue team, and have delivered nine units to n・・・・
More details>>
Development・Robot Technology

Explosion-proof work robot manufacturing · explosion-proof equipment development consulting
We design and manufacture autonomous mobile robots that can work in flammable gas filled environment that may explode. ・・・・
More details>>
Robot Technology
Numerical analysis
Numerical analysis of data measured with various sensors and signal processing. We are developing numerical analysis an・・・・
More details>>