【Aperçu】
Dans tout le pays, plus de 2 000 installations de traitement de pétrole ont un environnement de travail ayant de nombreuses substances explosives telles que l'huile volatile ou l'hydrogène.
Certains endroits remplissent l'environnement avec de l'azote, créant un environnement sans oxygène pour se prévenir des explosions. En particulier, les fours de désulfuration, en plus des conditions ci-dessus, présentent un mauvais environnement dans lequel la poussière peut s'accumuler. Par conséquent, le travail à l'intérieur de ces lieux se fait dans des conditions difficiles et présente des dangers menaçant la vie. Afin d'empêcher les travailleurs de faire face à des conditions de travail dangereuses, un robot de travail autonome est nécessaire.
Afin de permettre au robot de fonctionner automatiquement dans cet environnement dangereux, nous avons développé un logiciel lié à un capteur capable de distinguer les objets à 3 mètres de distances même dans des conditions très poussiéreuses. C'est le premier robot mobile autonome anti-déflagration pour raffinerie développé au Japon.
【Technologie 1】Fabrication de robot anti-déflagration
Nous avons conçu le corps, la structure mobile, le dispositif de contrôle pour s'adapter à la forme de la partie mobile, le dispositif de contrôle recevant la commande du logiciel embarqué et la boîte de stockage du capteur.
Un robot standard ne peut pas être utilisé dans un environnement rempli de gaz inflammable pouvant exploser en raison d'étincelles éventuelles. Le robot que nous avons fabriqué est conçu pour ne pas provoquer d'explosion (structure anti-déflagration à contrôle de pression interne).
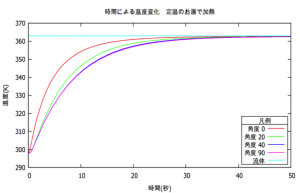
【Technologie 2】 Technologie de détection tridimensionnelle dans un environnement poussiéreux
Dans un fourneau où la poussière s'accumule (visibilité réduite), le mouvement automatique et le fonctionnement à distance du robot mobile sont réalisés par:
- Récupération de la position du robot en mesurant une source de lumière LED avec une caméra stéréo.
- Mesure de l'environnement du robot avec une caméra TOF.
[Expertise "anti-déflagration"]
Nous fournissons des services de consultation pour des équipements tels que des robots et des capteurs nécessitant des tests anti-déflagration.
※Un autre de nos robots a été certifié par l'Institut de Technologie de la Sécurité Industrielle (TIIS).
Ce robot a été présenté au ministère de l'économie, du commerce et de l'industrie.



")